Digital glass forming with learning-based control
Deployed multithreaded C++/rt-preempt Linux software on a multi-axis volumetric glass cell—kHz-class synchronized sensing and actuation, identified dynamics, z-domain tracking, and spatial ILC for repeatable layer builds under plant uncertainty.
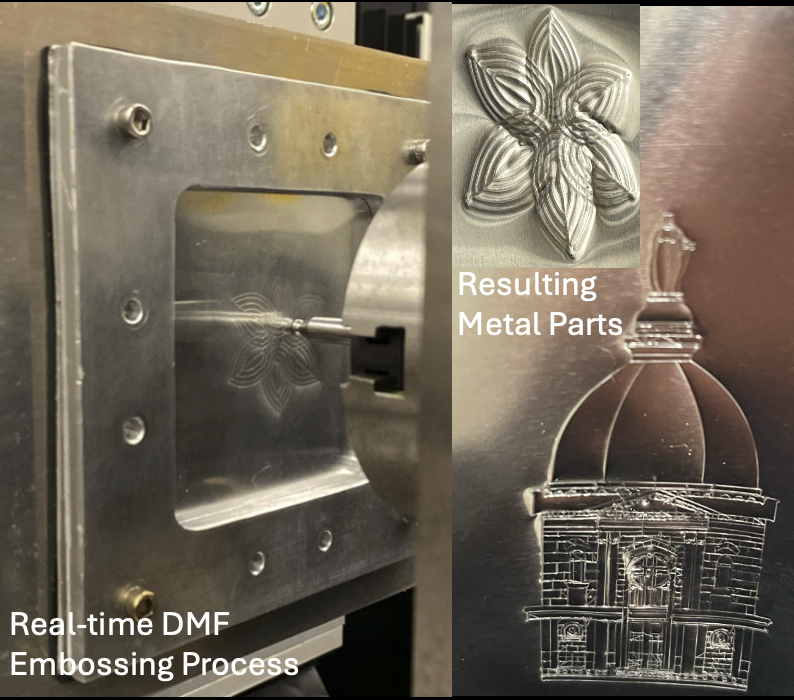
Fused thermal, vision, and motion feedback on deployed hardware to hold tight process envelopes and cut defect modes; layered VLM/VLA-style supervision for fault-prone operating regions. Related morphology/vision results in SFF 2025 proceedings.
Glass · real-time